Самодельная машинка на радиоуправлении имеет функции отслеживания пути, избегания препятствий, инфракрасное управление и управление через Bluetooth. Из данной инструкции вы узнаете как сделать машинку на радиоуправлении своими руками.
Машинка работает на микроконтроллере Atmega328. Самой удобной чертой ее является возможность управления со смартфона через модуль bluetooth. Для этой машинки есть ряд программ, расширяющих функции и возможности машинки на радиоуправлении на Ардуино.

Основные параметры модели на радиоуправлении:
- Двигатель: рабочее напряжение 6-9 В, передаточное число редуктора 1:48
- Драйвер двигателя L298N
- Три модуля отслеживания пути, отслеживают белый и черный цвета. Имеют функцию ограничения выезда за границу.
- Инфракрасный модуль передачи данных, для системы дистанционного управления машинкой.
- Модуль Bluetooth, для управления машинкой со смартфона.
- Питание 6-12 В, для различных сенсоров.
Компоненты:
- Шаговые электродвигатели – 4
- Колеса – 4
- Обоймы двигателей – 4
- Лист оргстекла 100x213x5 – 1
- Лист оргстекла 100x213x5 – 1
- Драйвер двигателя L298N — 1
- Микроконтроллер Arduino Uno 328 – 1
- Плата расширения Arduino Sensor Shield V5.0
- PTZ-камера – 1
- Сервомашинка – 1
- Ультразвуковой сенсор – 1
- Трехканальный модуль отслеживания пути – 1
- Инфракрасный сенсор – 1
- Измерительный преобразователь – 1
- Отсек для аккумуляторных батарей 18650 – 1
- Аккумуляторные батареи 18650 – 2
- Зарядное устройство для аккумуляторов 18650 – 1
- Модуль Bluetooth – 1
- Соединительные провода-перемычки мама-папа – 30
- Шнур USB 1 м – 1
- Медные цилиндры М3*20 мм – 3
- Медные цилиндры М3*35 мм – 6
- Медные цилиндры М3*20 мм – 3
- Медные цилиндры М3*6 мм – 6
- М3 3 мм винт и гайка
Порядок действий:
- Установка камеры и сервомашинки
- Установка ультразвукового датчика
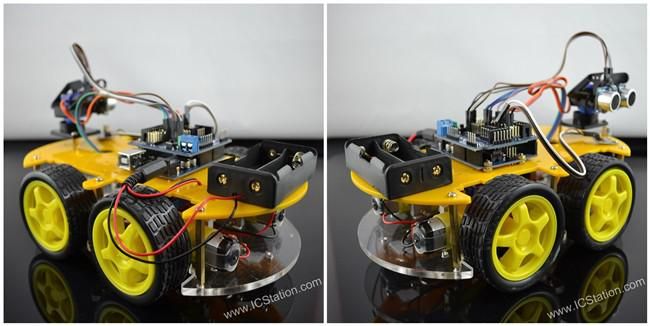
- Сборка шасси
- Описание устанавливаемых компонентов — драйвера двигателя L298N, датчика отслеживания пути, ультразвукового датчика для избегания препятствий, модуля Bluetooth для управления с телефона.
Шаг 1: Установка PTZ-камеры и сервомашинки

Шаг 2: Установите, как показано на фото

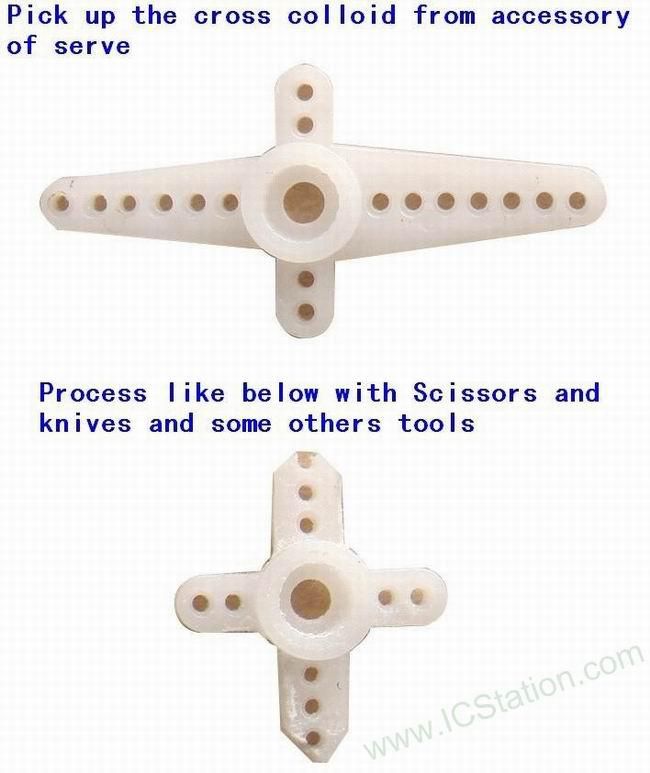
Шаг 3: Установка кронштейна для сервомашинки

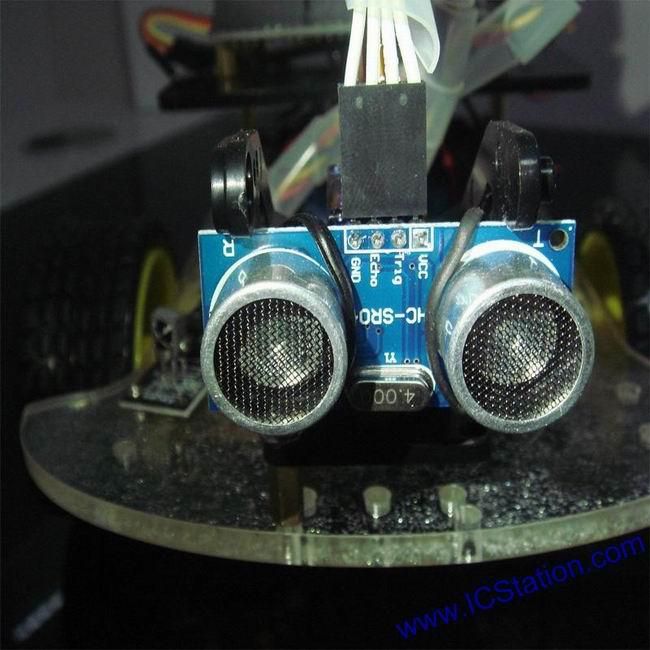
Шаг 4: Установка ультразвукового сенсора

Шаг 5: Установка модуля с ультразвуковым сенсором и сервомашинкой на шасси
Шаг 6: Устанавливаемые компоненты
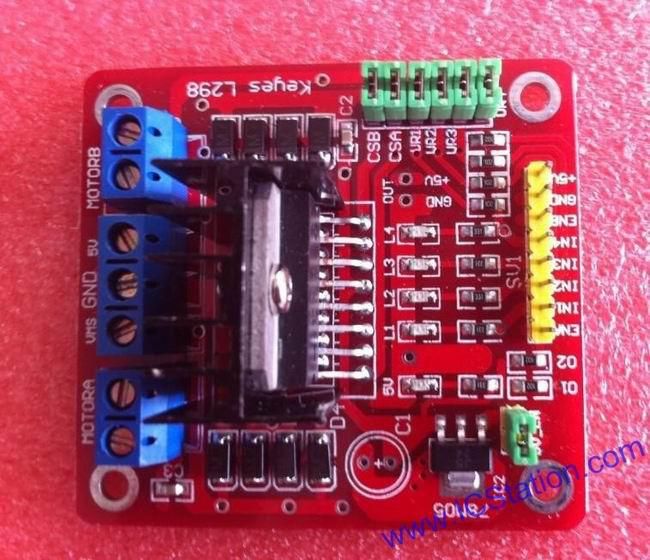

Драйвер двигателя L298N
- Выводы ENA (желтые на фото):
- 1(5V/PWM): включение двигателя А
- 0(GND/PWM): выключение двигателя A
- IN1 подключаем к 5V, IN2 к GND, синхронное вращение двигателя А, IN1 к GND, IN2 к 5V, повторный прогон двигателя А
- ENB(желтый на фото):
- 1(5V/PWM): включение двигателя В
- 0(GND/PWM): выключение двигателя В
- IN3 с 5V, IN4 с GND, синхронное вращение двигателя А
- IN3 с GND,IN4 toc 5V,повторный прогон двигателя А
Выводы 5V_EN (зеленые на фото):
- Если использовать провода-перемычки, стабилизатор 78m05 будет питать модули.
- Если обойтись без перемычек, нужно будет подключать модуль к выводам 5V и GND для питания сенсоров.
Перемычки CSA/CSB (зеленые на фото):
- Для текущих контрольных штырьков двигателей А/В
- Без использования перемычек – контроль утечки тока
- При использовании перемычек – отключает функцию защиты от перегрузки
Перемычки UR1-UR4 (зеленые на фото):
- Дают возможность использовать подтягивающий резистор
- Могут быть использованы как порт ввода/вывода, для предотвращения короткого замыкания с помощью подтягивающих резисторов
При использовании перемычки не используйте подтягивающие резисторы, и наоборот. Вы можете закодировать выводы драйвера по-другому.
Функция отслеживания пути в машинке
Принцип отслеживания: инфракрасные лучи, отраженные от поверхностей разного цвета, имеют разную интенсивность. Отраженный сигнал преобразуется в электрические сигналы. Датчик линии с высокой точностью определяет черный цвет, белый немного хуже, расстояние до измеряемой поверхности 0-3 см.
Функция избегания препятствий с помощью ультразвукового датчика:
Технология Bluetooth создана для передачи данных на коротких расстояниях, для облегчения обмена данными между настольными компьютерами, ноутбуками и мобильными телефонами.
Модуль Bluetooth нужен для обмена данными между контроллером и компьютером. Для подключения сначала нужно соединить плату модуля с 5В VCC, вывод GND на плате модуля с выводом GND контроллера, вывод TX контроллера с выводом RX модуля, а вывод RX контроллера – с выводом ТХ модуля. При правильном подключении модуля, при соединении контроллера с компьютером на модуле замигает огонек, при установленном соединении загорится зеленый огонек.
Немного расскажу о дистанционном управлении радиоуправляемой машиной на базе Arduino. Через модуль передаются команды движения вперед/назад, поворот влево/вправо; для управления с компьютера и со смартфона существуют два режима управления (версия Android на смартфоне должна быть 2.3.7 и выше; на компьютере должен быть установлен передатчик Bluetooth).
При первом сопряжении (или при длительном нахождении вне зоны сопряжения) со смартфоном следуйте следующим шагам:
- Включите Bluetooth на мобильном устройстве, открытое приложение также выведет сообщение о необходимости включить Bluetooth.
- Когда на экране появится идентификатор устройства, установите с ним соединение.
- Установите соединение, пароль «1234».