Если вы умеете паять, то этот небольшой проект отнимет у вас около 20 минут. Самодельный робот-таракан использует вибромотор в качестве своей головы, мотор питается от конденсатора, который также является и брюшком насекомого, в спецификации указаны следующие параметры конденсатора: 2.8V 5F, вы можете купить такой за 100-150 рублей.
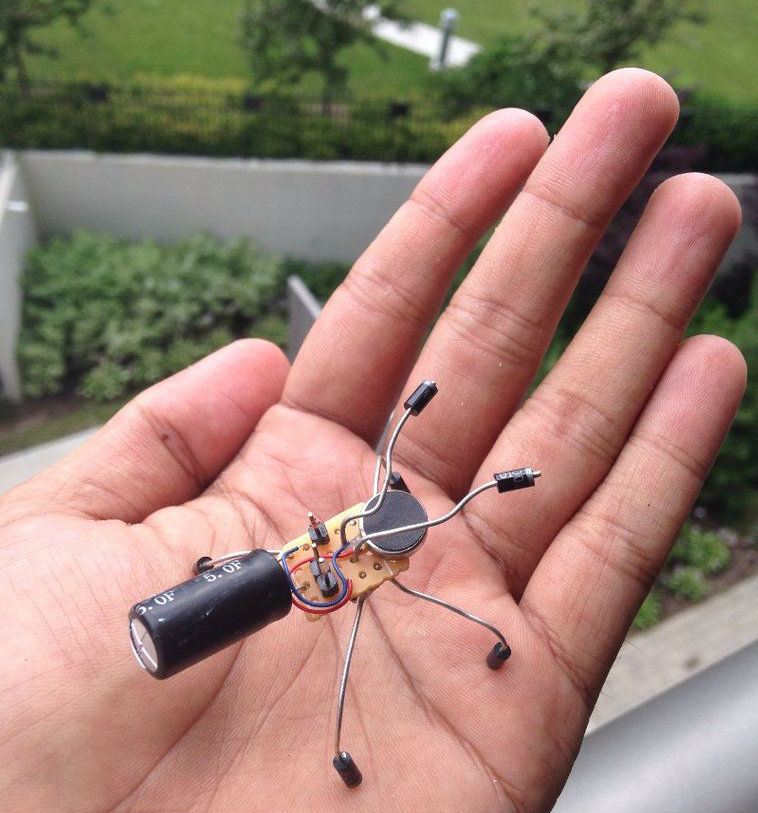

В качестве лапок и усиков можно использовать диоды или резисторы. Все эти компоненты спаиваются вместе на одной небольшой печатной плате, которая также является и грудной клеткой насекомого.
Так как в качестве источника питания микроробота используется суперконденсатор, то для питания нам понадобятся две батарейки AA (как показано в видео выше).
Шаг 1: Соберите нужную электронику


Для насекомого нам понадобится:
- Вибромотор (Adafruit)
- Суперконденсатор 2.8V 5F — я нашел свой в старом игрушечном самолёте
- Пины хедеры-папы
- Джамперы (Adafruit)
- Макетная плата (Ebay)
Для зарядника:
- 2 батарейки AA
- Отсек для батареек AA, желательно с выключателем
- Джампер-мама для припаивания к проводу из отсека батареек
- Термоусадочная трубка
В дополнение к компонентам, вот список приспособлений, нужных для завершения проекта:
- Припой
- Паяльник
- Рука-помощник для паяльника
- Ножницы
- Плоскогубцы
- Кусачки
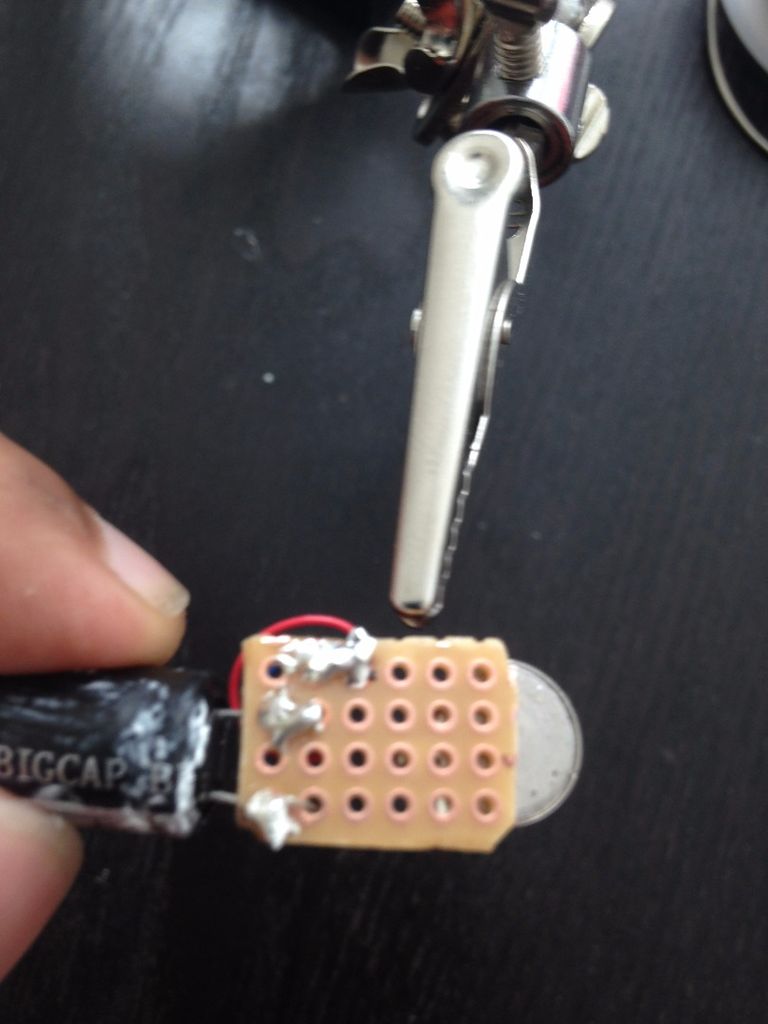
Шаг 2: Отрежем кусочек макетной платы
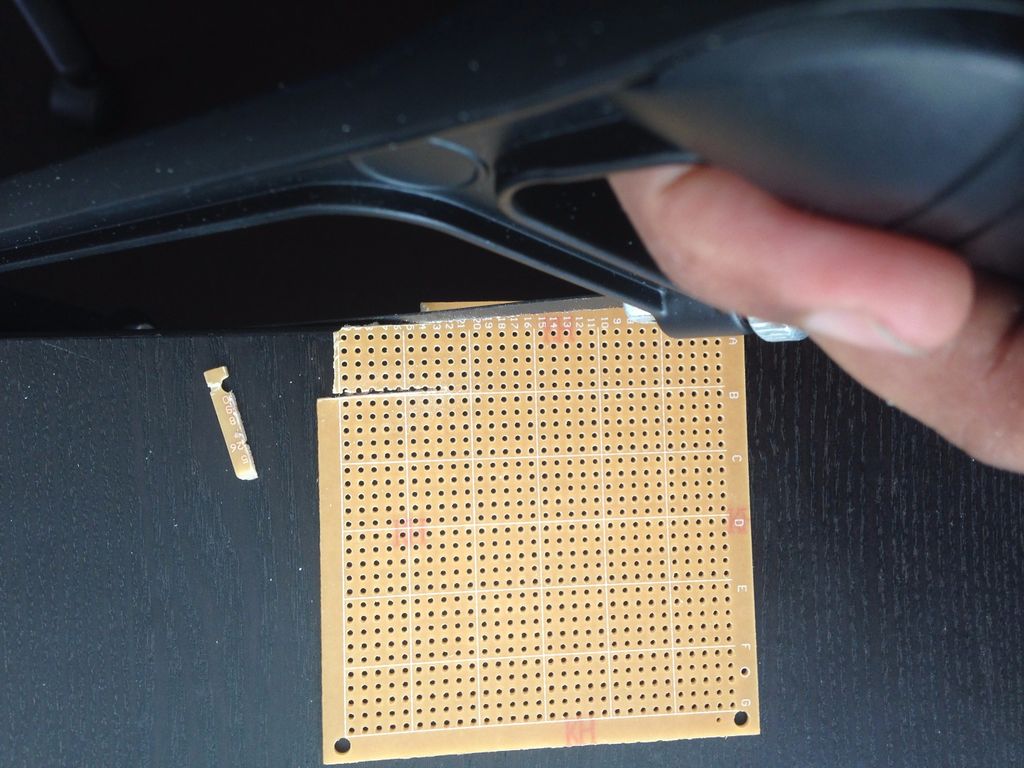
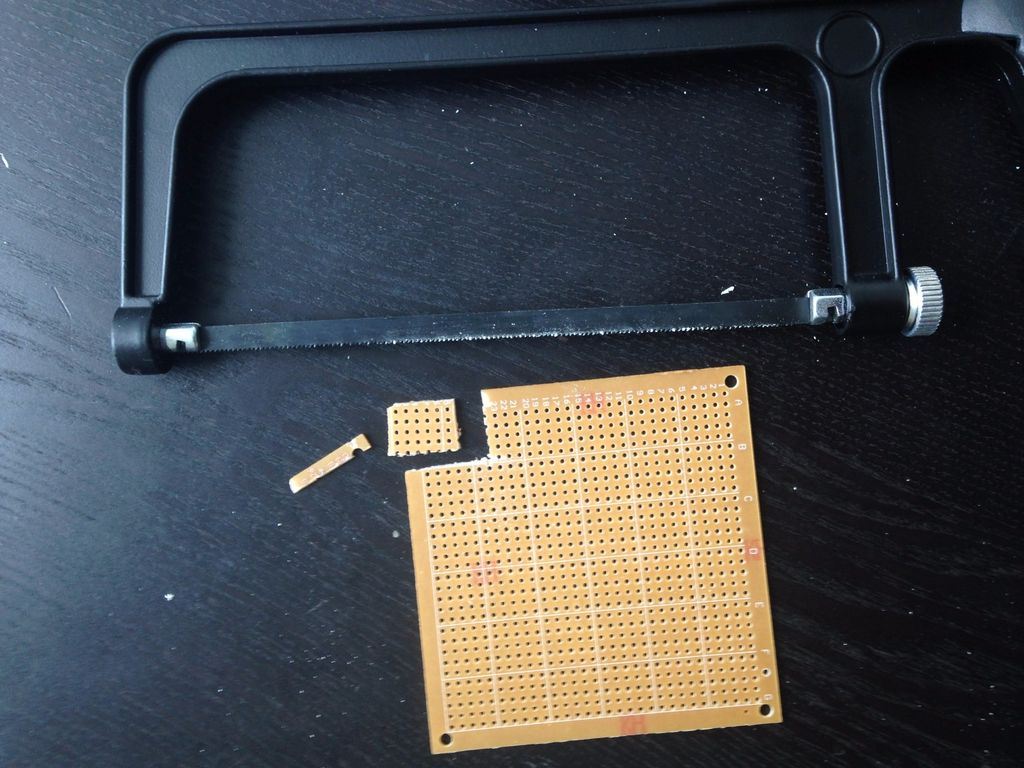

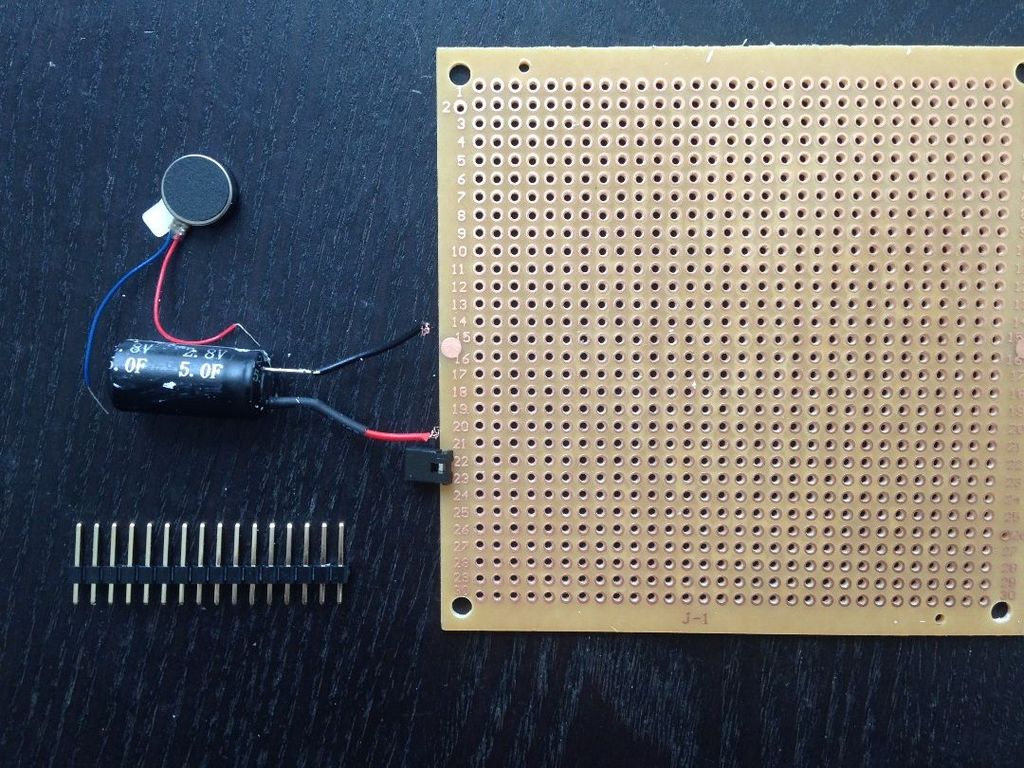
Отрежьте небольшой кусок макетной платы, вам понадобится как минимум размер 4*6 отверстий, как показано на фото. Если вы не слишком ловко паяете, то лучше вырезать кусочек 8*5 и у вас будет больше пространства для манёвров.
В дополнение отрежьте небольшой хедер, вам нужно будет две части, одна с двумя пинами, а другая с одним пином.
Шаг 3: Припаиваем конденсаторы и пины хедера

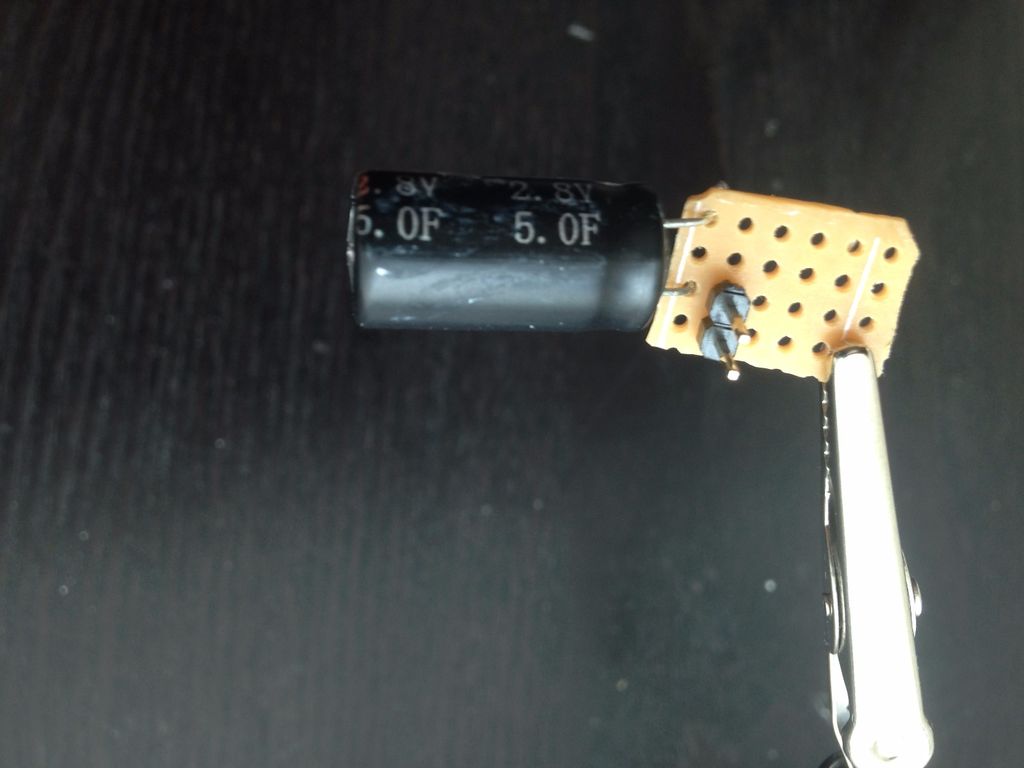
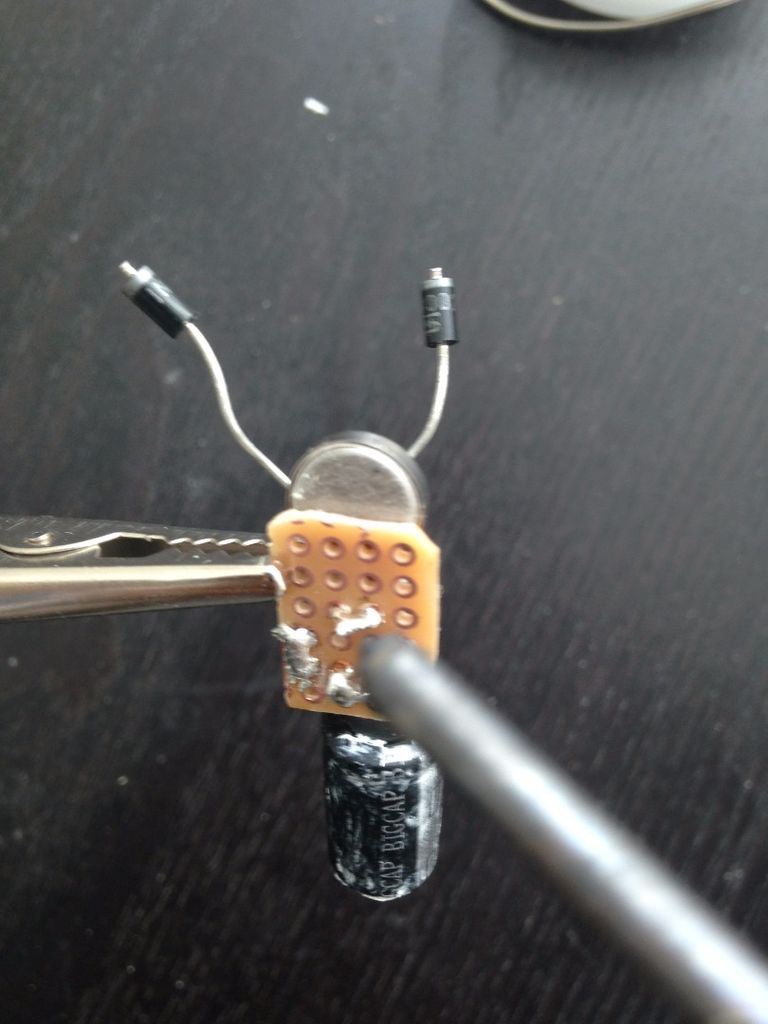
Припаяйте конденсатор к одному концу платы, как показано на картинке. Удерживая плату плоскогубцами, припаяйте хедер на нужное место (смотрите картинку), после этого соедините внутренний верхний пин с положительной ножкой конденсатора.
Шаг 4: Припаиваем моторчик
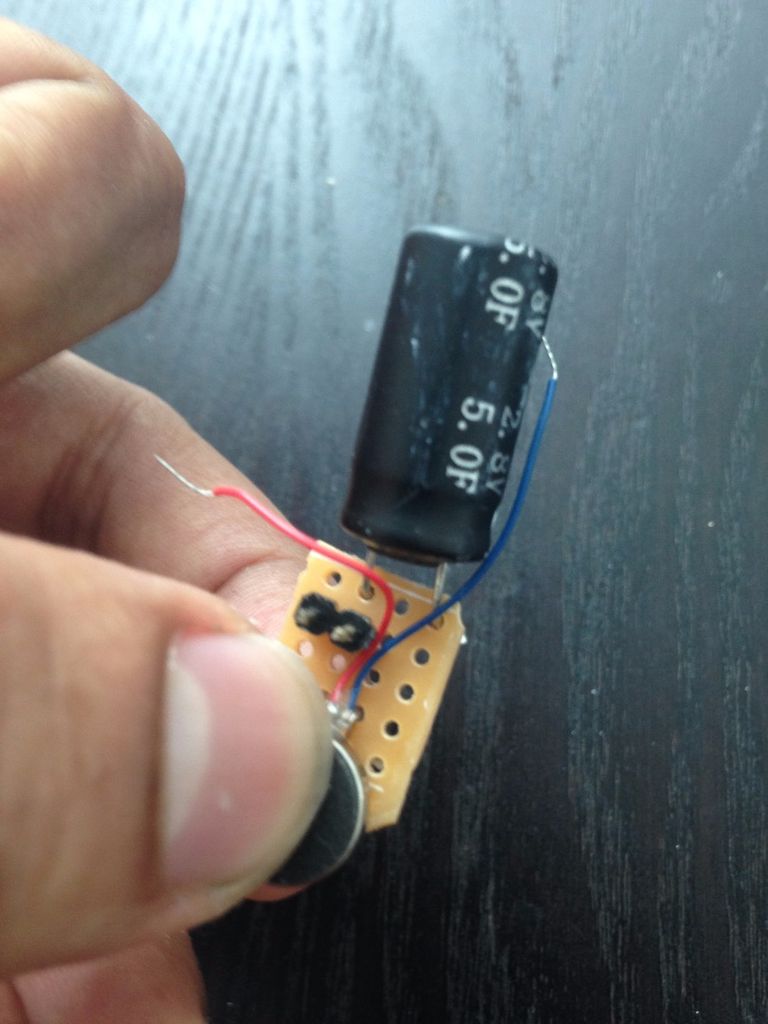



Счистите плёнку с липкой стороны моторчика и приклейте его к плате как показано на первой картинке.
Проденьте положительный красный провод вокруг пинов хедера (если провод лишком длинный) и припаяйте его ниже верхнего внешнего пина.
Теперь припаяйте отрицательный синий провод сразу ниже отрицательного от конденсатора. Затем припаяйте одиночный пин хедера ниже синего провода, как показано на четвёртой фотографии.
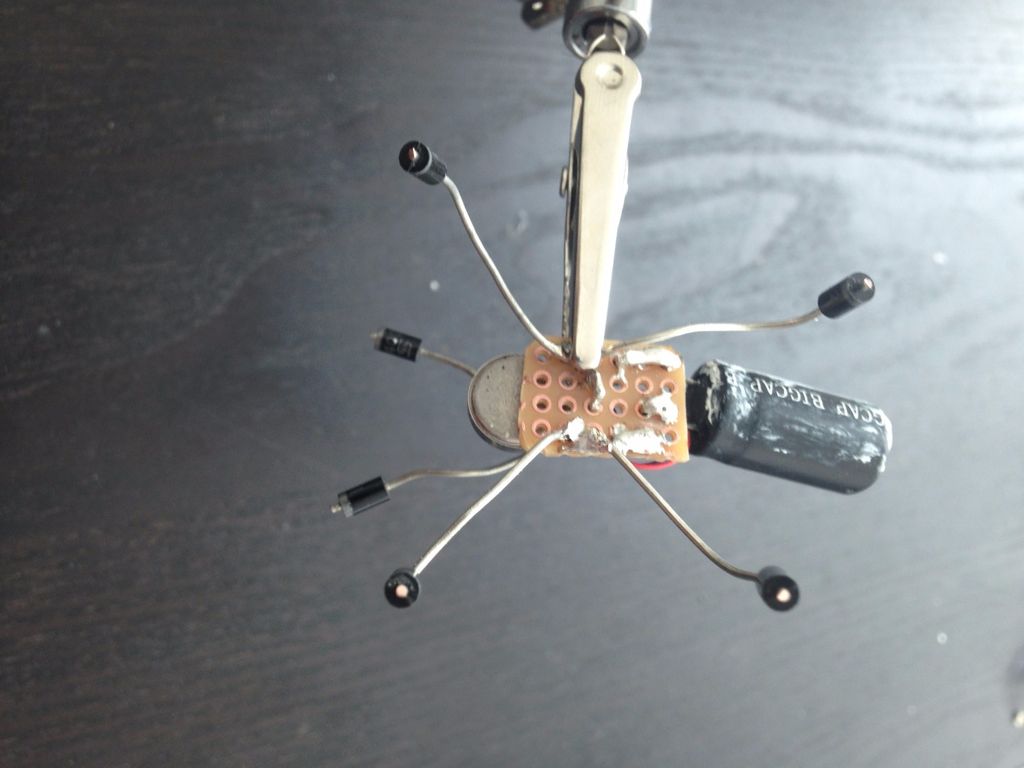
Шаг 5: Припаяйте усики и ножки
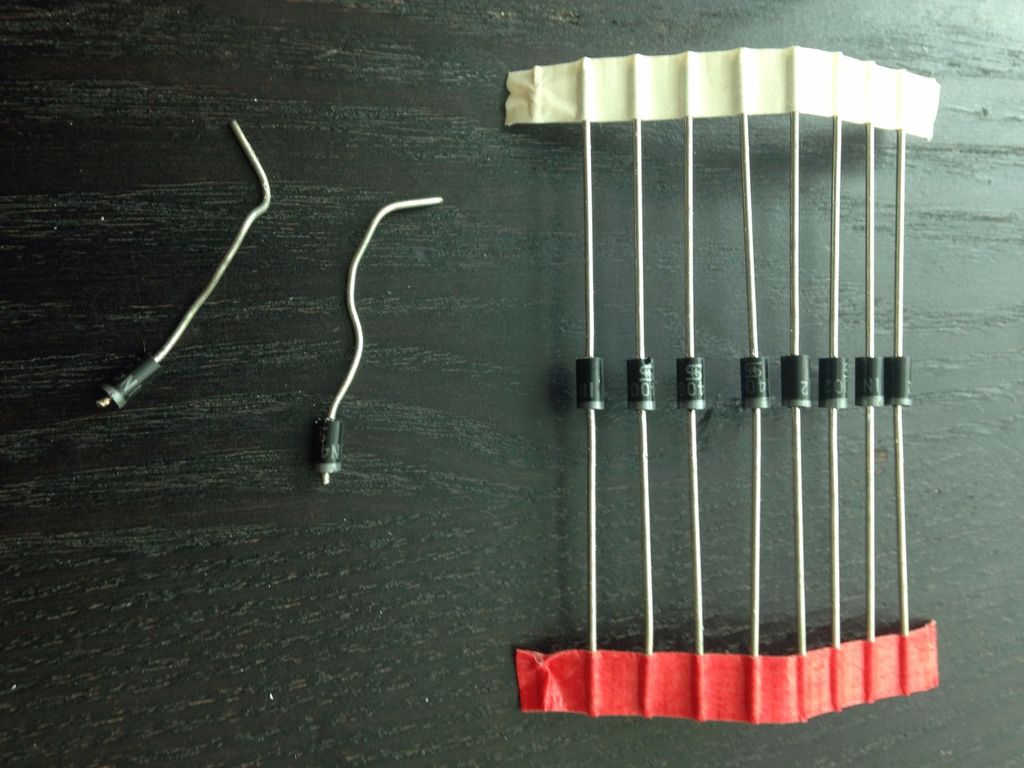

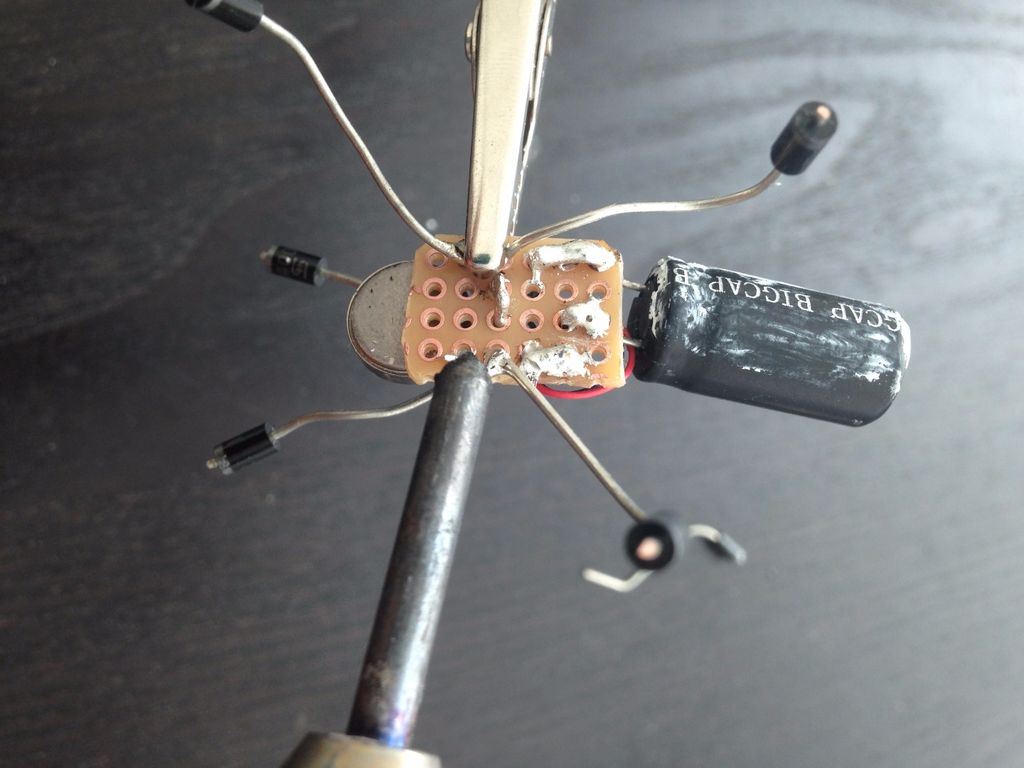
Для ножек и усиков можно использовать диоды и резисторы. Я использую диоды и буду писать о них. Ножницами обрежьте 6 диодов, как это показано на фотографии. Припаяйте два диода сразу ниже вибромотора — они будут играть роль усиков насекомого. Затем припаяйте 4 остальных диода в качестве ножек насекомого (как показано на картинке сверху).
Шаг 6: Припаиваем коннекторы к заряднику

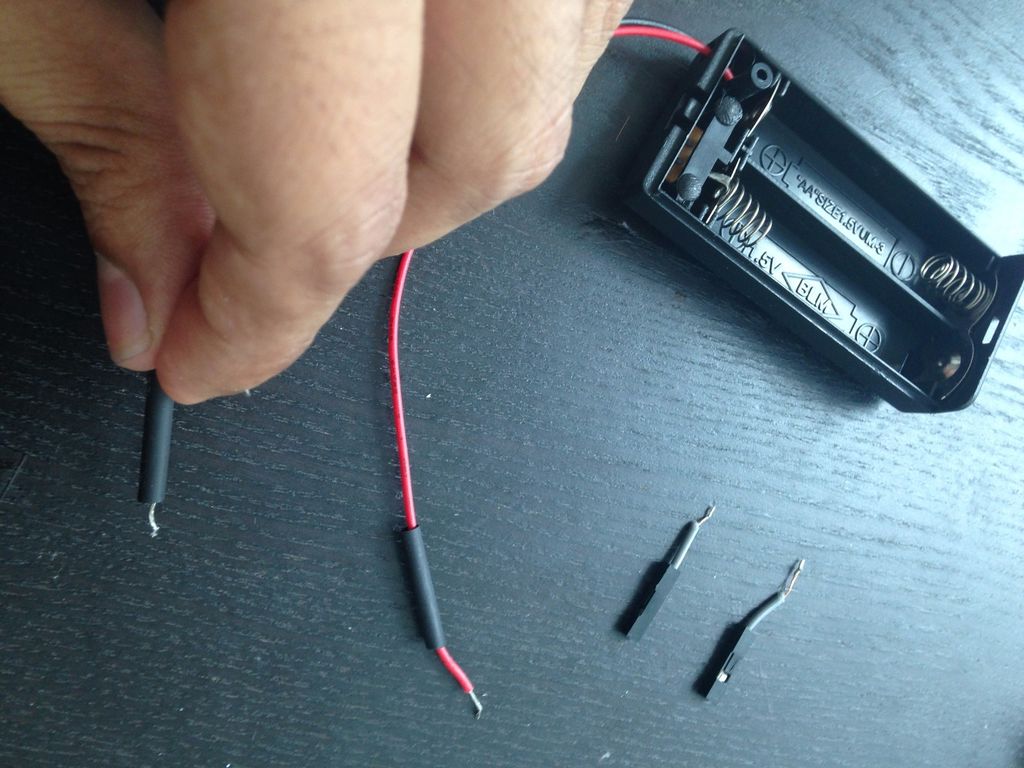
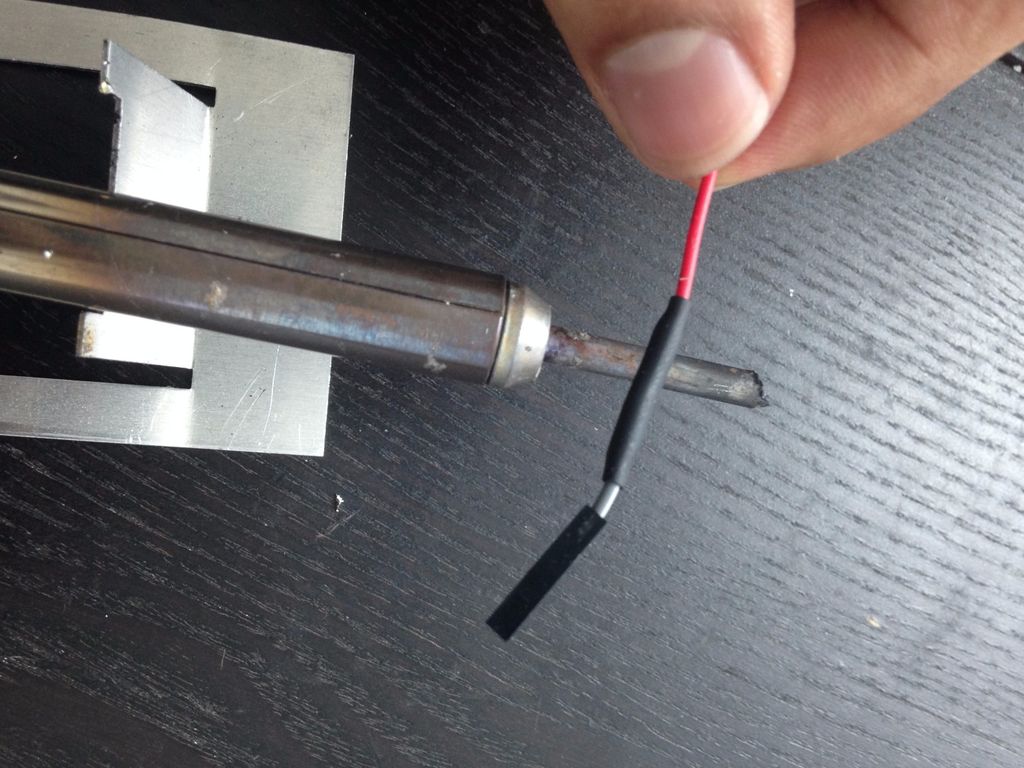
Чтобы создать зарядник для конденсатора, обрежьте концы джамперов-мам на кабелях, оголите и залудите концы поводов на проводах и отсеке батареек. Отрежьте два кусочка термоусадки и оденьте их на провода отсека батареек, как показано на картинке. Припаяйте джамперы-мамы к концам проводов отсека батареек. Используя источник тепла изолируйте соединение термоусадкой.
Шаг 7: Зарядка и тестирование робота-насекомого
Чтобы зарядить суперконденсатор, соедините отсек батареек с пинами, которые находятся сразу ниже конденсатора на плате насекомого (если отсек со включателем — включите его).
Как только вы подали питание, посчитайте до 10 и отключите его. Теперь используйте джампер, чтобы соединить два пина, как показано в приложенном видео и смотрите, как ваш микро-робот начал двигаться по столу.
Шаг 8: Рекомендации по пайке

Если вы всё делали правильно и дошли до этого шага — поздравляю вас, вы создали робота-жука.
Я приложу несколько советов по пайке элементов:
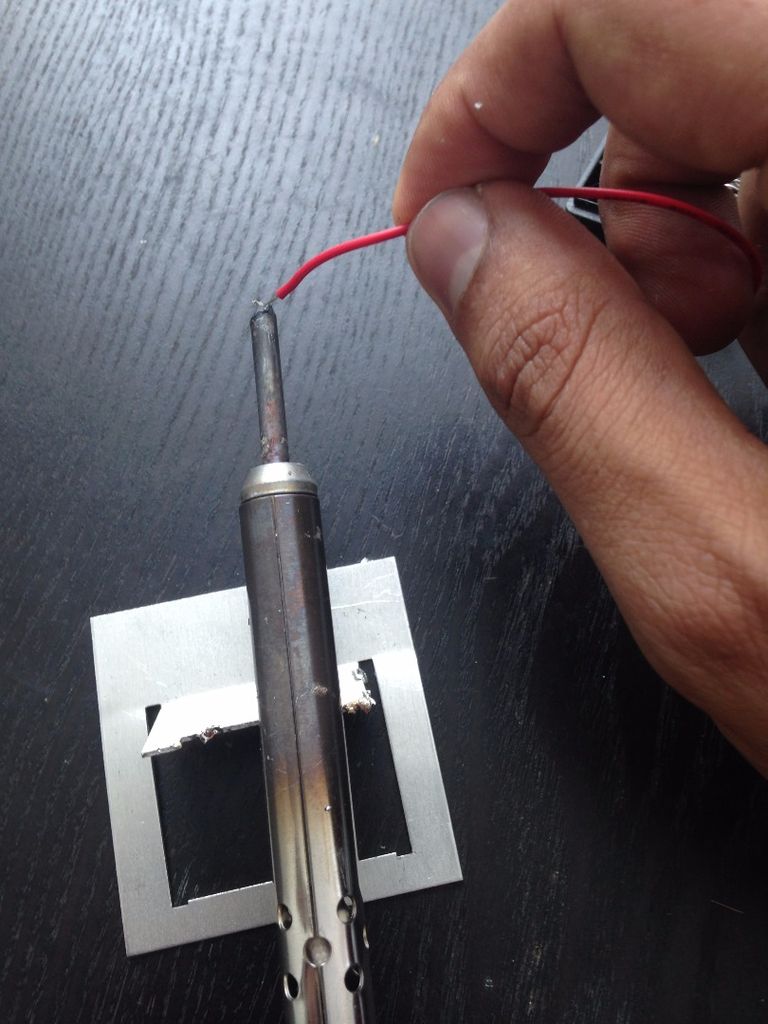
- Перед спаиванием двух проводов, обязательно залудите их
- Как только вы припаяли компонент, например конденсатор или диод, слегка покачайте его, чтобы проверить, что он надёжно держится на месте.
- Если по какой-то причине вы допустили ошибку при спайке, всегда лучше отпаять элемент при помощи паяльной станции или нагрева, а затем использовать свежий припой для создания нового соединения, вместо того, чтобы пытаться восстановить плохое соединение.
- Как только вы закончили паять, всегда чистите носик паяльника
- Для термоусадки — вместо использования зажигалки или пламени, просто прокрутите трубку над кончиком паяльника, как показано на картинке.