Вид от первого лица — одна из лучших особенностей у девайсов в мире беспроводного управления. Я люблю собирать квадрокоптеры размера 250 — они скоростные и можно управлять ими от первого лица, но они слишком большие. Но из-за их громоздкого размера и опасных пропеллеров, почти нереально запустить их, если кто-то находится рядом.
В дополнение, если вы разобьете квадрокоптер класса 250, вы влетите на крупную сумму при ремонте. Чтобы решить проблему размера и при этом не упустить возможность подключения к квадрокоптеру камеры, я спроектировал мини квадрокоптер с винтами на моторах в 8.5 мм. Результат оказался впечатляющим — можно летать с видом от первого лица по своей квартире и не беспокоиться о том, что разобьешь аппарат. Кроме того, цена такого устройства относительно невысока и стоит каждой вложенной копейки!


Вот небольшое видео с процессом сборки
Модули, которые вам понадобятся:
- Контроллер полёта Micro Scisky (ссылка). Это стандартный контроллер, основанный на Naze FC. Множество людей использует его для микро квадрокоптеров — он мелкий и мощный!
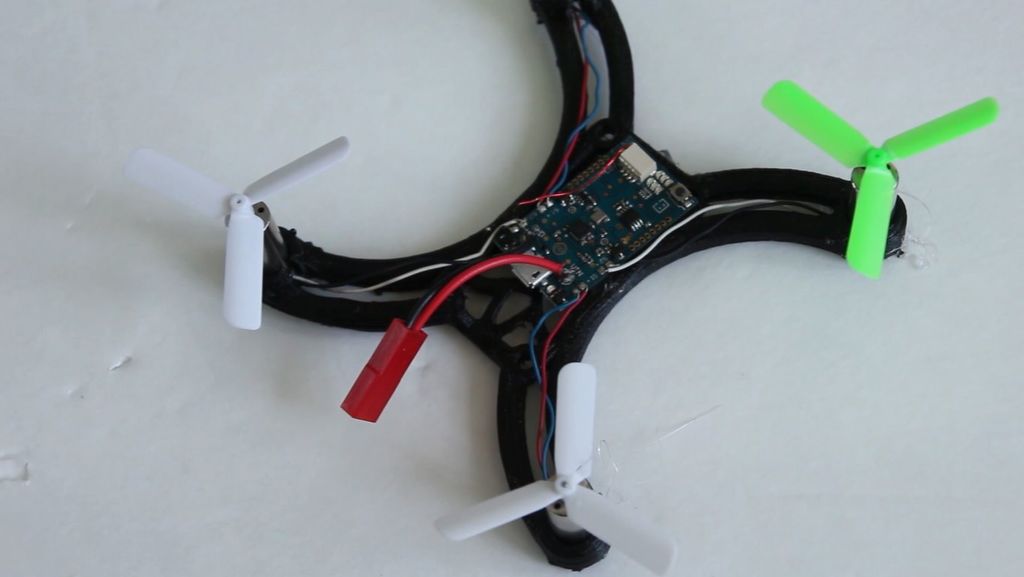
- Набор пропеллеров и моторчиков на 8.5 мм (ссылка). По ссылке очень хороший набор из 4 моторчиков — 2 работают по часовой стрелке (красно-синие) и два против (черно-белые). Также в комплекте 8 пропеллеров.
- Батарейка на 3.7V (ссылка). По ссылке 7 батареек на 750MAh, которые поставляются с зарядником.
- Пульт DSM2 TX — я использовал MKron T — SIX i6S (ссылка). Он был намного дешевле, чем Tyranis dsm2.
Электроника для вида от первого лица:
- Очки. По ссылке — отличный образец. Он поставляется со своей батарейкой.
- Трансмиттер (ссылка)и камера (ссылка). Они оказались достаточно тяжелыми и я решил, что в следующий раз попробую камеру Spektrum.
Ко всему понадобится оборудование, которое у вас и так должно быть (паяльник, горячий клей, термоусадка и т.д.)
Также для создания рамы мне понадобился 3D принтер, но я видел умельцев, которые делали раму из палочек от мороженого — не обязательно всё делать идеально, для квадрокоптера подойдут любые ухищрения, главное, чтобы всё было достаточно лёгким.
Приступим к сборке.
Шаг 1: Напечатаем раму


В интернете я нашел раму для 105 квадрокоптера, она выглядела очень неплохо. Если у вас нет 3D принтера, то обратитесь в местную фирму, которая занимается 3D печатью. Мои настройки: высота 0.2 мм, толщина 1.0 мм, заполнение 20%. скорость 50 мм/с, температура 210, печатал, используя волокно 1.75 PLA.
Вот ссылка на мой 3D файл: ссылка
Шаг 2: Пайка
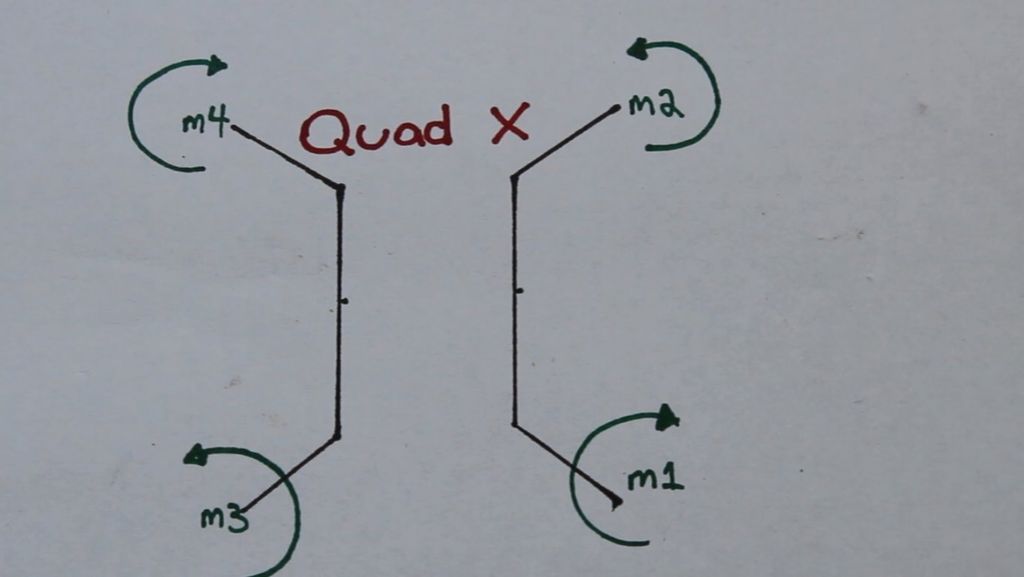
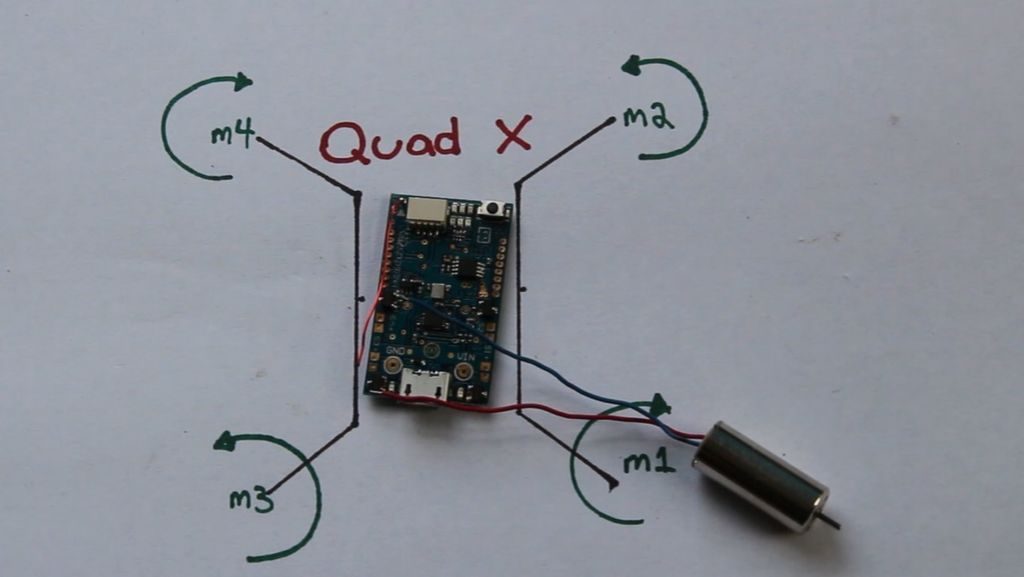


Сперва я определил сторону, в которую будет смотреть маленький квадрокоптер. Затем нарисовал простую схемку на чистой бумаге и отобразил, в какую сторону будут ориентированы моторы — я выбрал схему Quad X (нижние на рисунке будут передними, а верхние задними):
- 4 2
- 3 1
Моторчики 4 и 1 работают по часовой стрелке, моторчики 3 и 2 — против часовой стрелки.
В зависимости от того, где вы купили моторчики, их ориентация может меняться, но обычно красно-синие крутятся по часовой стрелке, а черно-белые против. Если вы не уверены — поговорите с продавцом или почитайте инструкции. Обычно красный это «+», синий это «-«, белый это «+», черный это «-«. Но опять же, вы должны быть уверенны, что ваша схема работы та же, что и у меня — проверьте и перепроверьте всё дважды и убедитесь в соответствии плюсов и минусов и в том, что не создадите короткое замыкание.
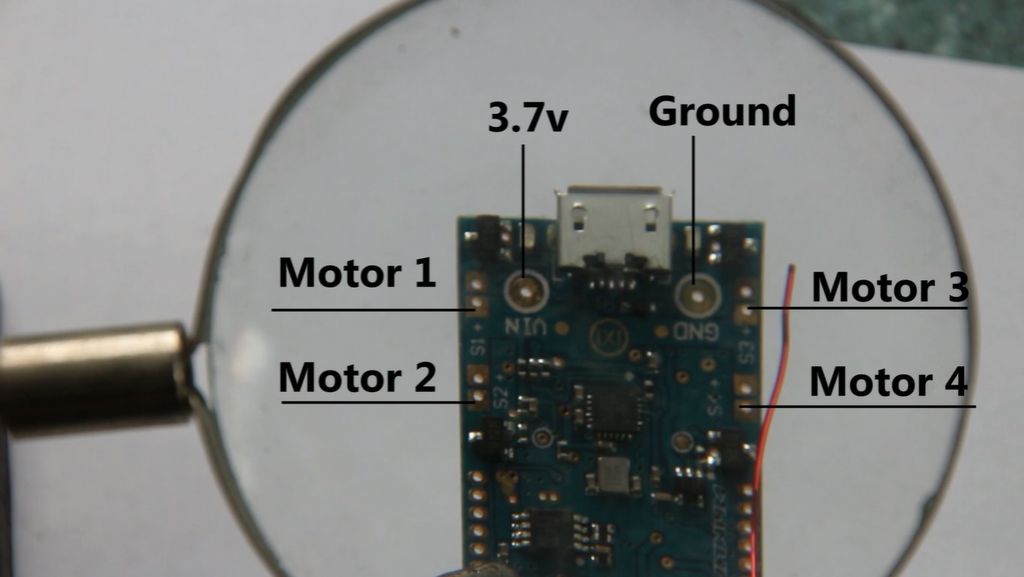
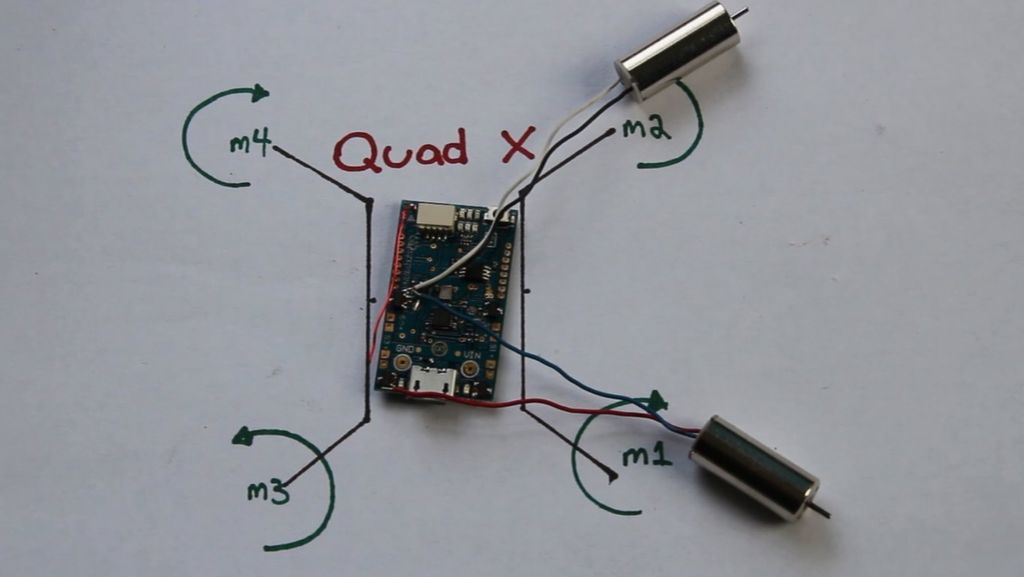
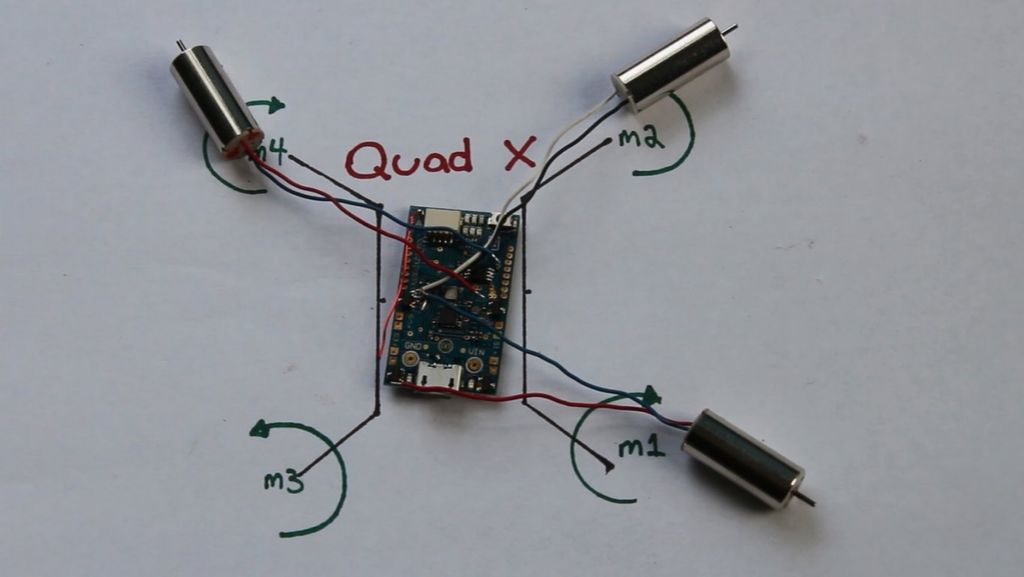
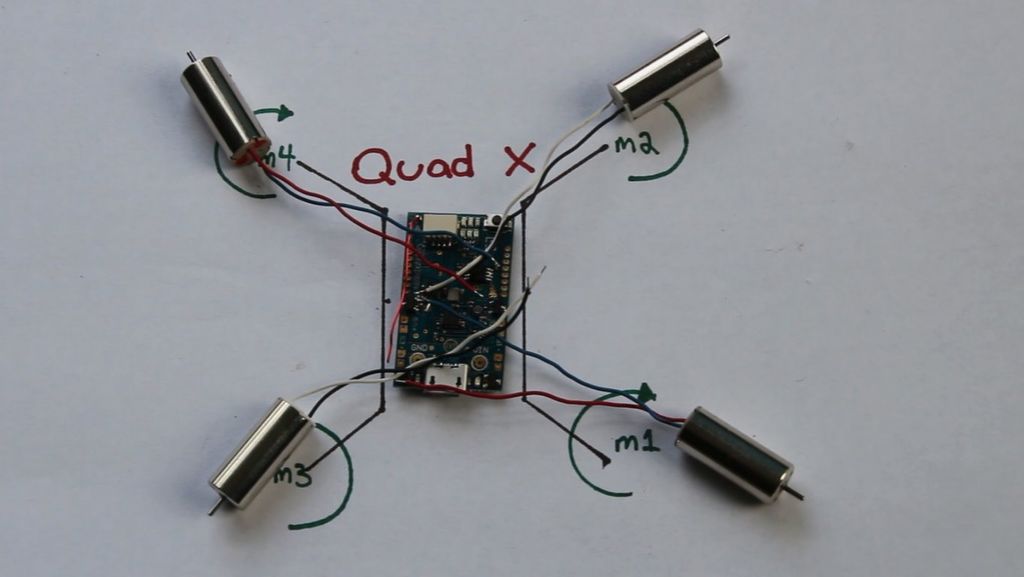
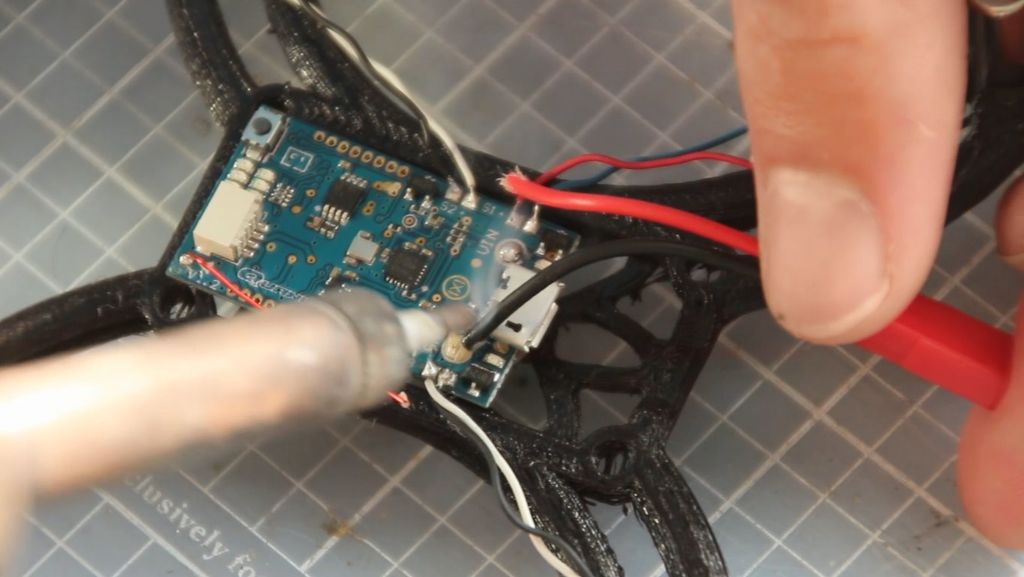
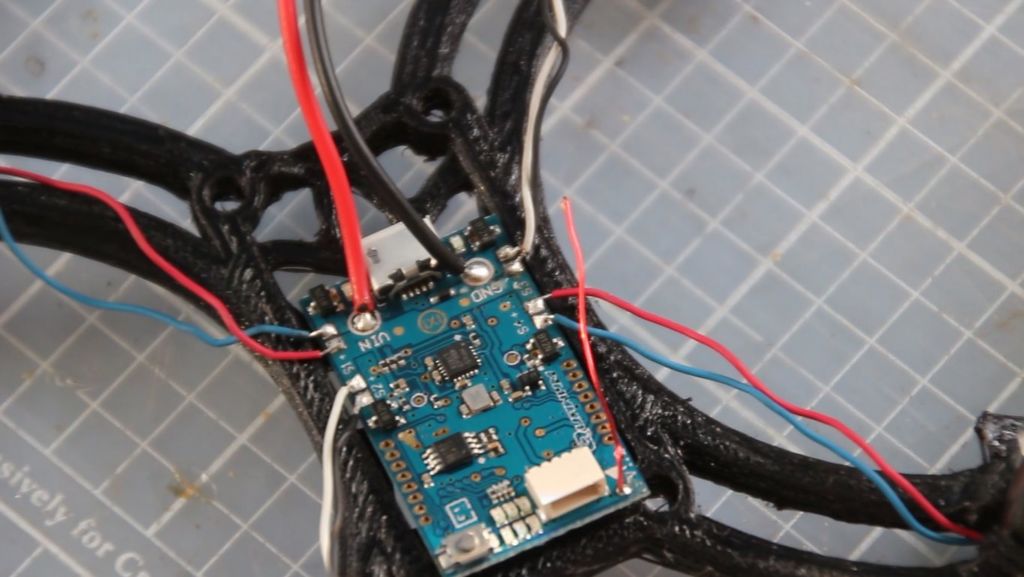
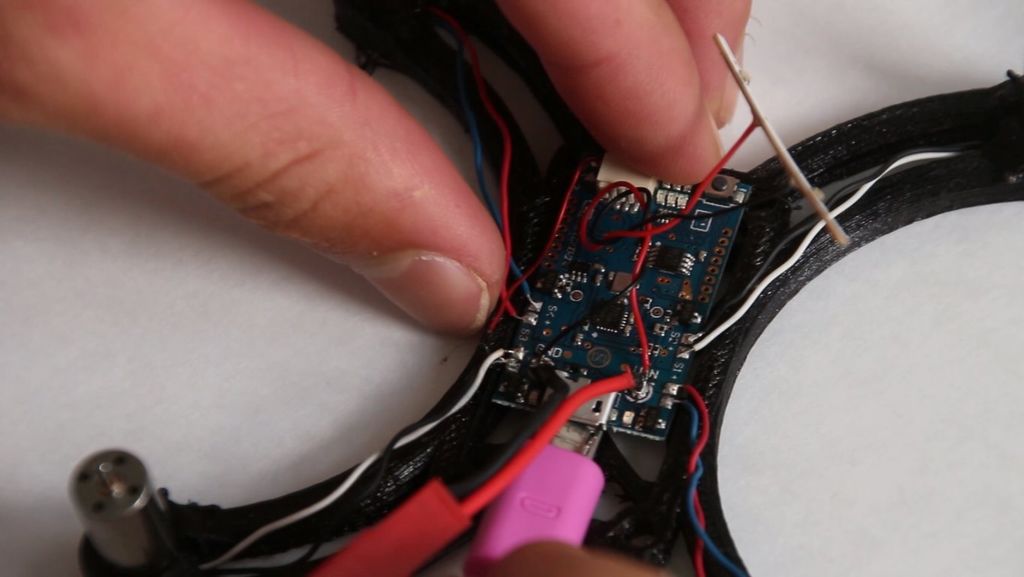
Спайка элементов достаточно проста. На плате отчетливо отмечены плюс и минус для 3.7V. Используя соединитель-маму JST, я припаял провода от соответствующих клемм на плате к клеммам на моторчиках. Просто припаяйте моторчик 1 к гнезду для моторчика 1, моторчик 2 ко второму гнезду и т.д. Набор батареек шел с зарядником, но они были под другой коннектор. Чтобы решить эту проблему, я перепаял зарядник на разъём-папу JST
Чтобы подключить камеру, я подцепил её к трансмиттеру FPV и припаял вход 3.7-5V напрямую к входу питания контроллера полёта, таким образом, они параллельно разделили питание от батарейки. Трансмиттеру для вида от первого лица нужно питание 3.7V — тот же самый вольтаж, который мы и используем.
Шаг 3: Программирование
Это наиболее сложная часть сборки и она требует терпения.
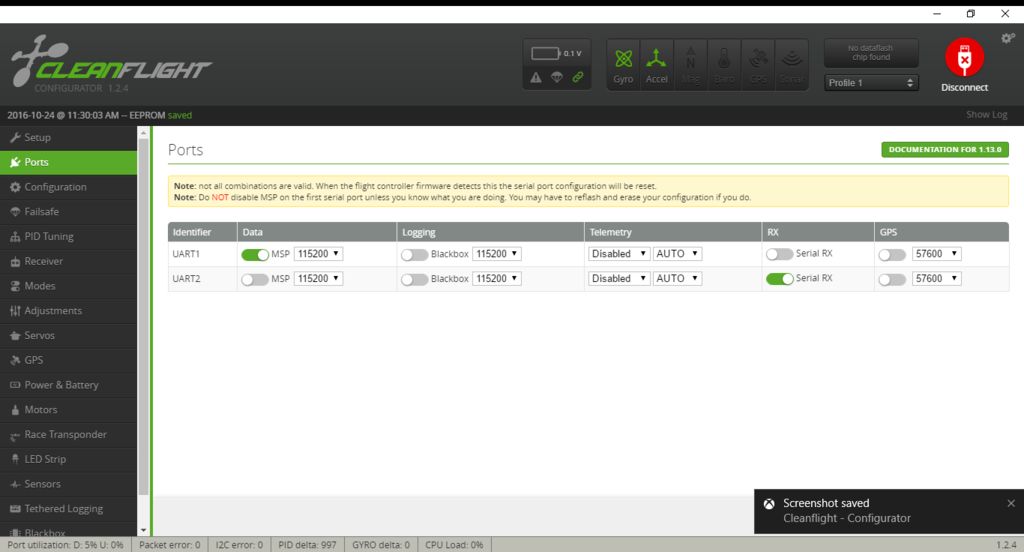
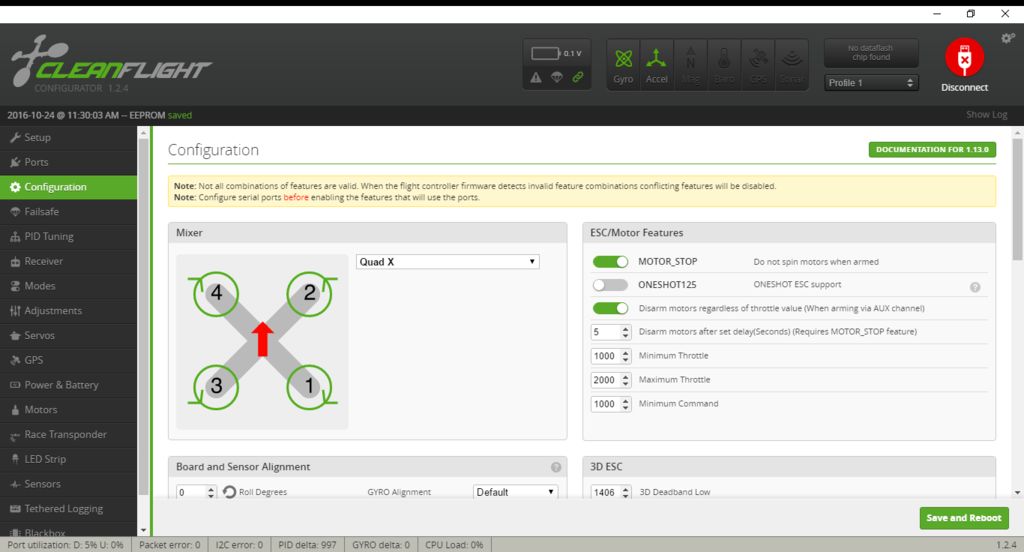
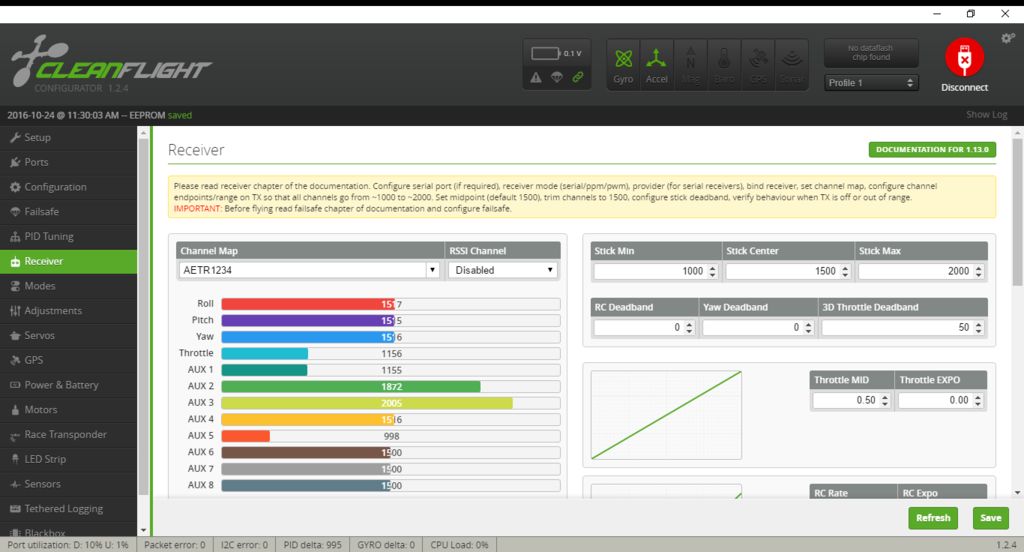
Сперва, я подключил контроллер полёта к программе CleanFlight и начал программировать. Убедитесь, что батарейка и USB не подключены одновременно, иначе вы можете поджарить свою плату! Как только я подключил плату, я прошил её свежайшим софтом от NAZE и соединил с CleanFlight. В CleanFlight выберите Quad X и возможность остановки моторчиков. Я перешел на страницу Receiver и проверил RX_PPM, а также показатель channel map TAER 1234, если каналы не работают, то попробуйте переопределить их порядок, кликнув и напечатав что-то типа AETR1234. Я установил минимальный дроссель (minimum throttle) на 1000, средний на 1500 и максимальный на 2000, показатель Minimum command выставил на 1000. Также я использовал отказоустойчивое падение на этом квадрокоптере — я решил, что рама достаточно прочна для падений и не хотел, чтобы квадрокоптер опускался вниз медленно.
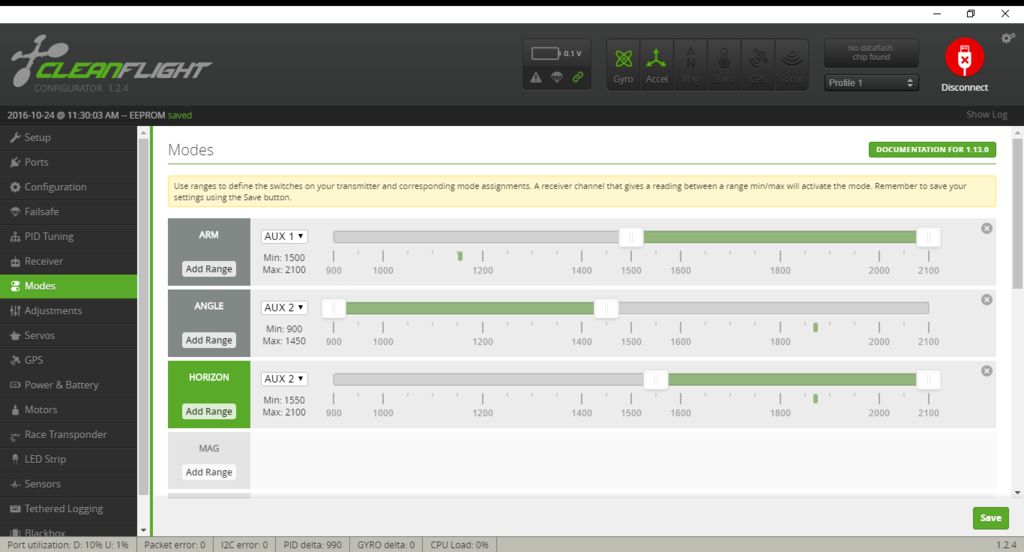
Во вкладке Modes, кликните add range и используя ваши каналы TX добавьте режимы. Помните, что вам нужно добавить переключатель на micro scisky. Я выбрал режим Flight, хотя обычно выбираю acro. Используйте любой режим, который вам нравится. Для новичков лучше всего подойдёт Horizon. В CLI нажмите Type: установите motor_pwm_rate=23200 (другие используют 32000). Затем сохраните настройки, нажмите enter. Затем настройте PID так, как вам нравится и сохраните. Не забудьте нажать Save на каждой странице, иначе настройки будут потеряны!
Шаг 4: Соединение и пропеллеры


Следующим шагом нужно связать пульт и трансмиттер. Подключите Scisky и подождите 10 секунд, пока красный огонёк не начнёт мигать. Это означает, что вы в режиме соединения (Bind mode), так что включайте трансмиттер и зажимайте переключатель Bind на его задней стенке. Как только красный цвет начнёт гореть непрерывно, приступайте к подсоединению пропеллеров.
Для лучшего напора, я использовал пропеллеры с тремя лезвиями, идущие в комплекте с моторчиками. Легкий способ определить, какой пропеллер подходит к какому моторчику — это представить их вращение. Представьте, что пропеллер представляет собой вращающийся болт с резьбой, а воздух — гайка. Представьте, в каком направлении нужно крутить пропеллер, чтобы «закрутить» его — по часовой стрелке или против. А затем возьмите их и подключите к соответствующим моторчикам. Все четыре пропеллера должны закручивать дрон с камерой вверх, будучи подключенными к своим моторчикам.
Шаг 5: Взлёт!



Подключите батарейку, соедините камеру вида от первого лица и очки и заводите моторы! И помните, что у вас не огромный квадрокоптер, а мини-версия, которой можно управлять в помещениях и небольших пространствах.